六自由度
六自由度
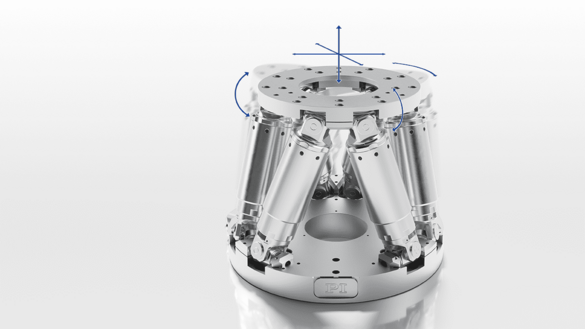
精密六足位移台只需一个机械结构即可实现六个自由度的运动。 平台在三个平移轴(X、Y、Z)和三个旋转轴(ΘX、ΘY、ΘZ)上移动。 六足位移台的典型并联运动结构由六个长度可变的促动器组成,每个促动器通过万向节与底板和活动平台相连。
可自由定义的旋转中心

可自由定义的旋转中心
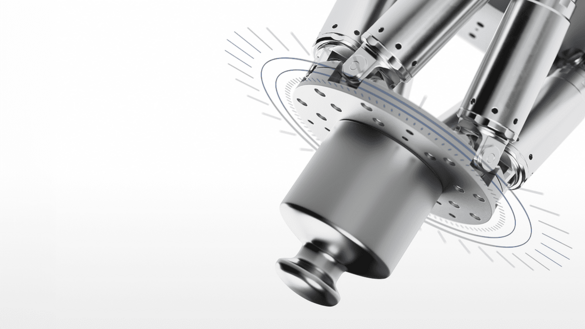
对于Physik Instrumente (PI)的精密六足位移台,旋转中心的位置(枢轴点)和参考坐标系的方向可通过软件命令快速轻松地定义。 在坐标系内,可自由选择的旋转中心提供了充分的灵活性,使六足位移台运动平台能够准确地适应特定要求。 预定义的工件和工具坐标系可随时启用或停用。 无需更换任何机械部件。

出色的跟踪精度和动态性能
出色的跟踪精度和动态性能
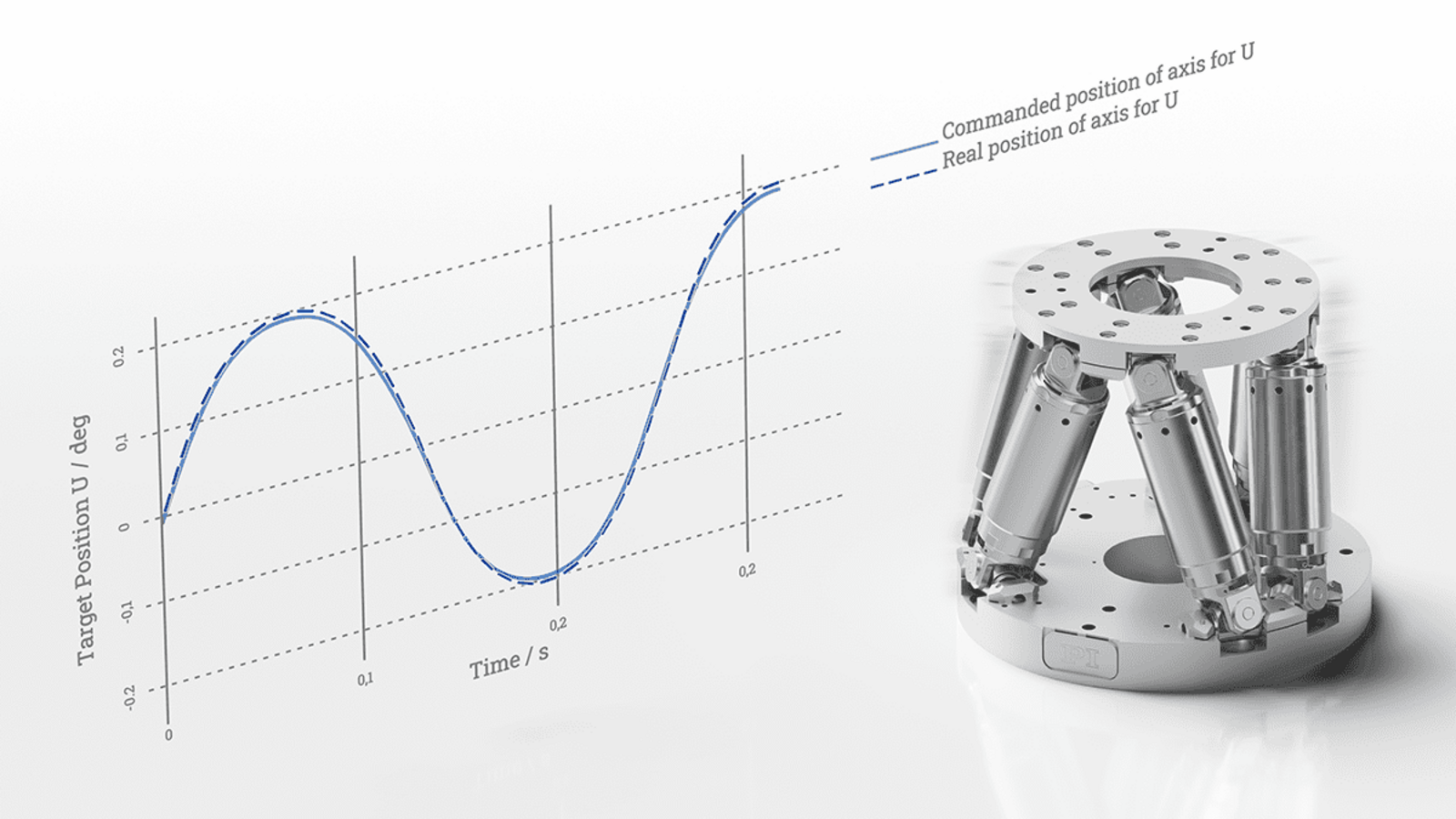
系统的高动态性能和精密的控制器可实现目标与实际位置之间的适当对准。 正弦振荡轨迹可根据需要通过控制器实现,并可以实现运动序列的最大跟踪精度。 此外,由于促动器仅移动平台,因此质量很小,因而实现动态运动和振荡的能耗相对较低。
易于集成
功能强大的六足位移台控制器可确保对并联运动系统进行简单直观的控制: 所有目标位置均可在直角坐标系中进行控制。 控制器通过计算来控制促动器,从而实现平台的预期运动。 PI的通用图形用户界面(GUI)不仅可用于控制和启动所有六足位移台系统,还可用于控制和启动采用任何驱动技术的所有其他PI定位系统。 工业EtherCAT®接口可用于集成到自动化流程中。
了解各种PI精密六足位移台
PI精密六足位移台以三十多年的开发和制造经验为基础。 凭借其从压电到电磁的广泛驱动技术组合,PI将六足位移台与出色的传感器技术、软件和运动控制器相结合,可满足各种规格要求和安装情况。 借助功能强大、操作直观的控制器和软件,可轻松精密地控制六足位移台。
了解我们种类繁多的PI精密六足位移台,标准型号的承载能力从1kg到250kg不等,重复精度可达±0.06µm。 此外,还提供承载能力超过2000kg的定制精密六足位移台。
