晶圆检验和计量
高度动态且精确的运动系统用于晶圆定位
高效的晶圆检验和计量对于确保稳定、高性能的半导体制造过程至关重要。 半导体制造涉及多达800个复杂的生产步骤,因此需要在每个关键阶段进行精确的检验和计量,以保证高质量和产量。
PI的先进运动和定位解决方案处于支持关键应用的前沿,如叠加计量、薄膜计量、边缘位置误差(EPE)计量和自动光学检测(AOI)。 通过将晶圆扫描和高速测试能力与动态定位及超精确的Z轴聚焦调整相结合,PI实现了先进的过程控制,帮助制造商尽早发现缺陷。 这项技术设计为具有多种配置,以满足特定的应用需求,确保在不同半导体制造过程中具有灵活性和适应性。 通过尖端的运动控制和复杂的算法,这些解决方案减少了产量损失并降低了生产成本。
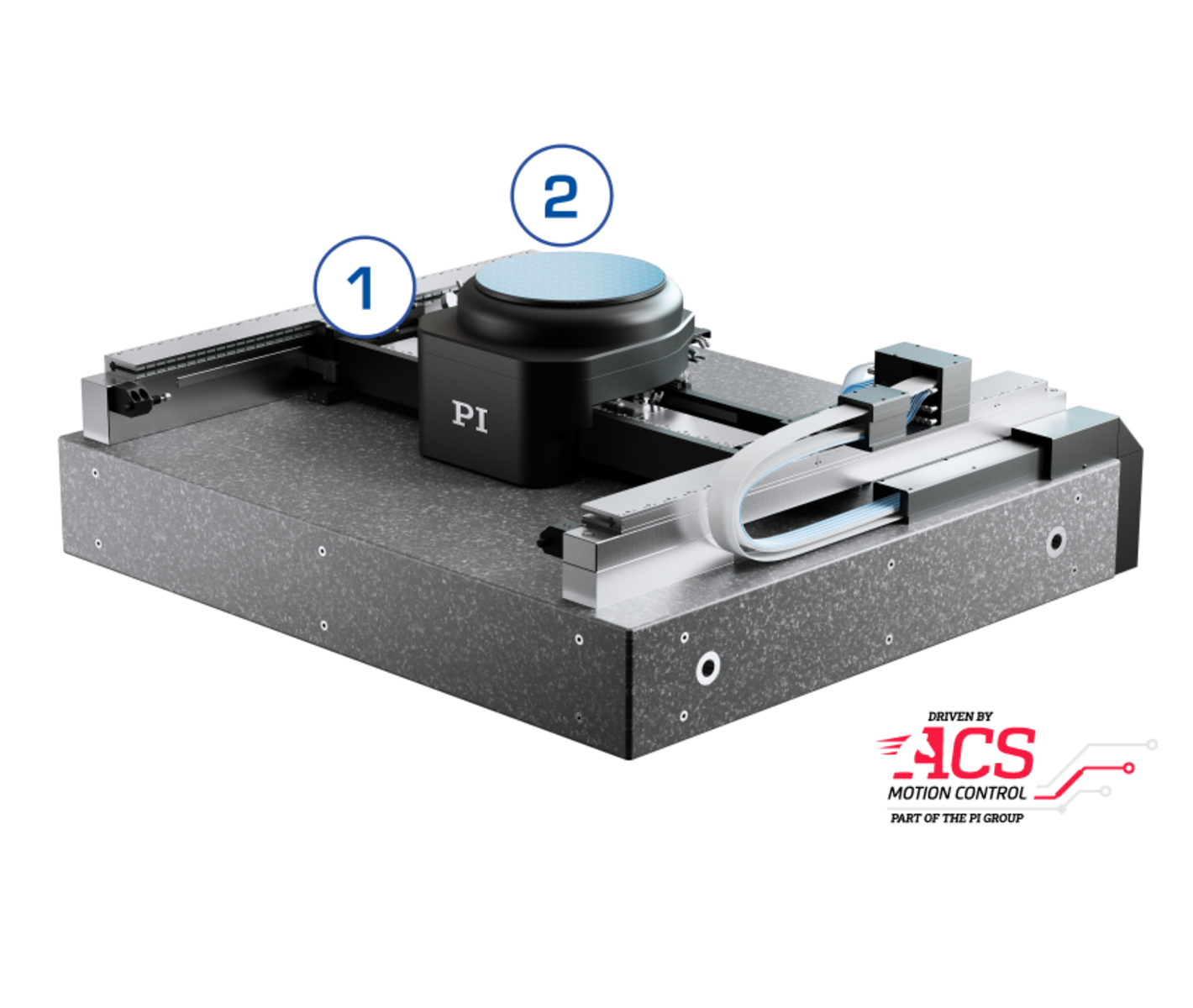

XY轴 - 精密扫描与步进和稳定运动
- 花岗岩底板,提供高刚性,增强平面度和直线度
- 无铁芯直接驱动直线电机,提供无齿槽高扫描速度及快速步进和稳定运动
- 高分辨率光栅尺可实现快速启动、高可靠性和高安全性
- 集成电缆管理可减少运动阻力并延长使用寿命
- 可选花岗岩平面扫描仪,配备空气轴承和偏转角控制,可24/7全天候高占空比运行,并具有较小的径向跳动误差与纳米级直线度和平面度
>> 直接驱动直线电机平台
>> 空气轴承平面扫描仪

θZ Z偏摆轴 - 晶圆定位
- 多轴混合压电电机技术,用于补偿晶圆错位和高带宽动态焦点跟踪
- 无需额外冷却或平衡的无能耗位置锁定
- 在检查过程中对晶圆稳定定位,位置稳定性小于10nm
- 移动和稳定时间小于10ms
- 集成直流电机用于提升晶圆性能,双向重复性小于1µm
>> 高动态且精密的压电晶圆定位解决方案

灵活轻松的自动化控制
- EtherCAT®控制器,支持开放网络连接
- 先进算法提供快速步进和稳定、优秀的位置稳定性以及出色的恒定扫描速度
- 先进的ACS控制功能,可选配额外算法(轨迹优化、图像识别、“首次故障定位”、运动误差、输入整形和EtherCAT协议)
- 结合了支持双向通信的ACS和压电陶瓷控制器,可实现实时运动控制
- 控制器具有自动聚焦功能,可实现动态聚焦调整
- 前瞻功能可调整速度以保持精度
>> 运动控制器
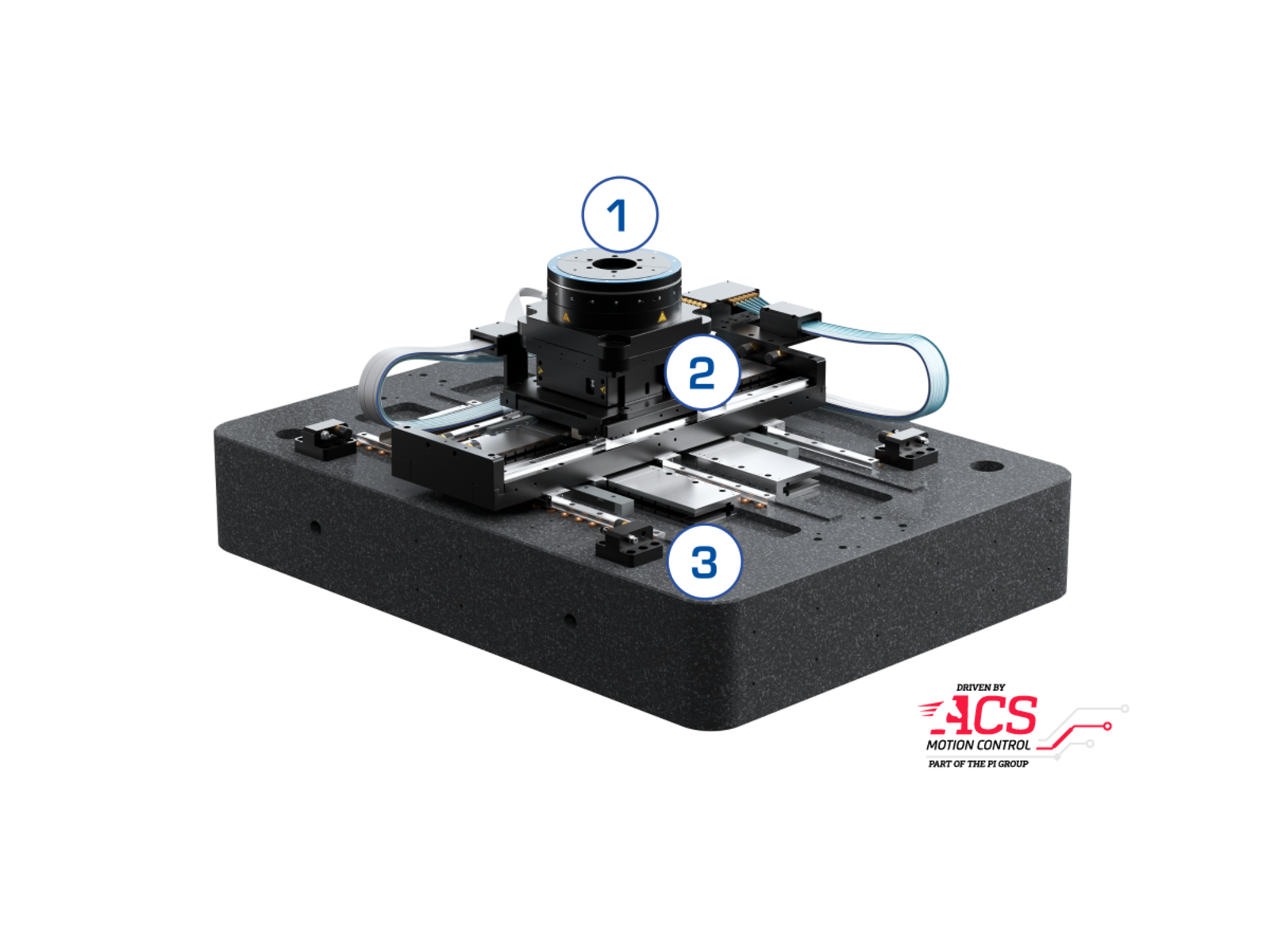
θZ轴 - 晶圆或基板的精细旋转分度和对准
- 高精度且可重复的360°旋转,无空回
- 磁性直接驱动器可实现高速度和加速度
- 直接驱动、无槽、无刷力矩电机可提供极低的齿槽转矩并实现平稳的速度和低误差运动
- 超精密空气轴承由内部开发和制造
- 性能更上一层楼,进一步优化异步性能规格
>> 直接驱动力矩电机技术
Z轴 - 精密晶圆对准
- 低矮外形、高负载、结构紧凑的优异设计
- 直驱音圈技术可实现零齿槽效应、纳米级步长的平滑运动以及快速响应
- 高分辨率光栅尺可实现运动平台的纳米级定位
- 高精度防蠕动交叉滚柱轴承
- 气动平衡防止电机发热和碰撞
- 经济实惠,交付快捷
>> 直接驱动电机技术

XY轴 - 精密步进和稳定运动
- 基轴上配有高动态耦合无铁芯直线电机,可实现强大、快速和精密的运动
- 双光栅尺系统确保电机和偏转角对准,同时提高分辨率和精度
- 低矮外形的多轴承刚性平台,可减少阿贝偏移并提高平面度和直线度
- 设计可实现高度的灵活性和定制性
- 优化的集成电缆管理可减少运动阻力并延长使用寿命
- 花岗岩底座可确保运动系统的较高性能
- 选装主动式隔离减振
>> 直接驱动直线电机平台
灵活轻松的自动化控制
- EtherCAT®控制器,支持开放网络连接
- 先进算法提供快速步进和稳定、优秀的位置稳定性以及出色的恒定扫描速度
>> ServoBoost™ - 控制器具有自动聚焦功能,可实现动态聚焦调整
- 前瞻功能可调整速度以保持精度
>> 运动控制器
规格
| 运动 | 定制的X轴 | 定制的Y轴 | V-Z03改进版 | Theta | 单位 | 公差 |
|---|---|---|---|---|---|---|
| 主动轴 | X | Y | Z | T | ||
| 行程 | 365 | 355 | 5 | 无限 | mm | |
| 最大加速度 | 15 | 15 | 3 | 41.8rad/s² | m/s² | 空载 |
| 最大速度 | 1000 | 1000 | 20 | 41.8rad/s | mm/s | 空载 |
| 双向重复性 | ±0.4 | ±0.4 | ±0.25 | ±1arcsec | µm | 典型值 |
| 精度(已校准) | ±1 | ±1 | ±0.5 | ±2arcsec | µm | 典型值 |
| 直线度 | ±2.5 | ±2.5 | ±1 | ±0.1 | µm | |
| 平面度 | ±2.5 | ±2.5 | ±1 | ±0.1 | µm | |
| 俯仰角 | ±5 | ±10 | ±10 | ±0.5 | arcsecs | |
| 偏转角 | ±10 | ±10 | ±10 | ±0.5 | arcsecs | |
| 最小位移 | 0.1 | 0.1 | 0.1 | 0.5arcsec | µm | |
| 抖动 | ±10 | ±10 | ±10 | ±0.2arcsec | nm | |
| 总体平面度 | 15 | µm | ||||
| 负载容量 | 5.0 | kg | ||||
| 电气性能 | |
|---|---|
| 运动控制器型号及版本 | SP+EC-08080864NBN5NDNN(1件) |
| 驱动器模块产品编号 |
NPMpm2D20N0YBBANNB(1件) NPMpm2B20N0YBBANNB(1件) UDMsa-1B101-TNNNN(2件) |
| 数字I/O | 否 |
| 安全扭矩切断(STO) | 是 |
| 控制集成解决方案 | 框架内的电气元件 |
| 配件 | 不适用 |
