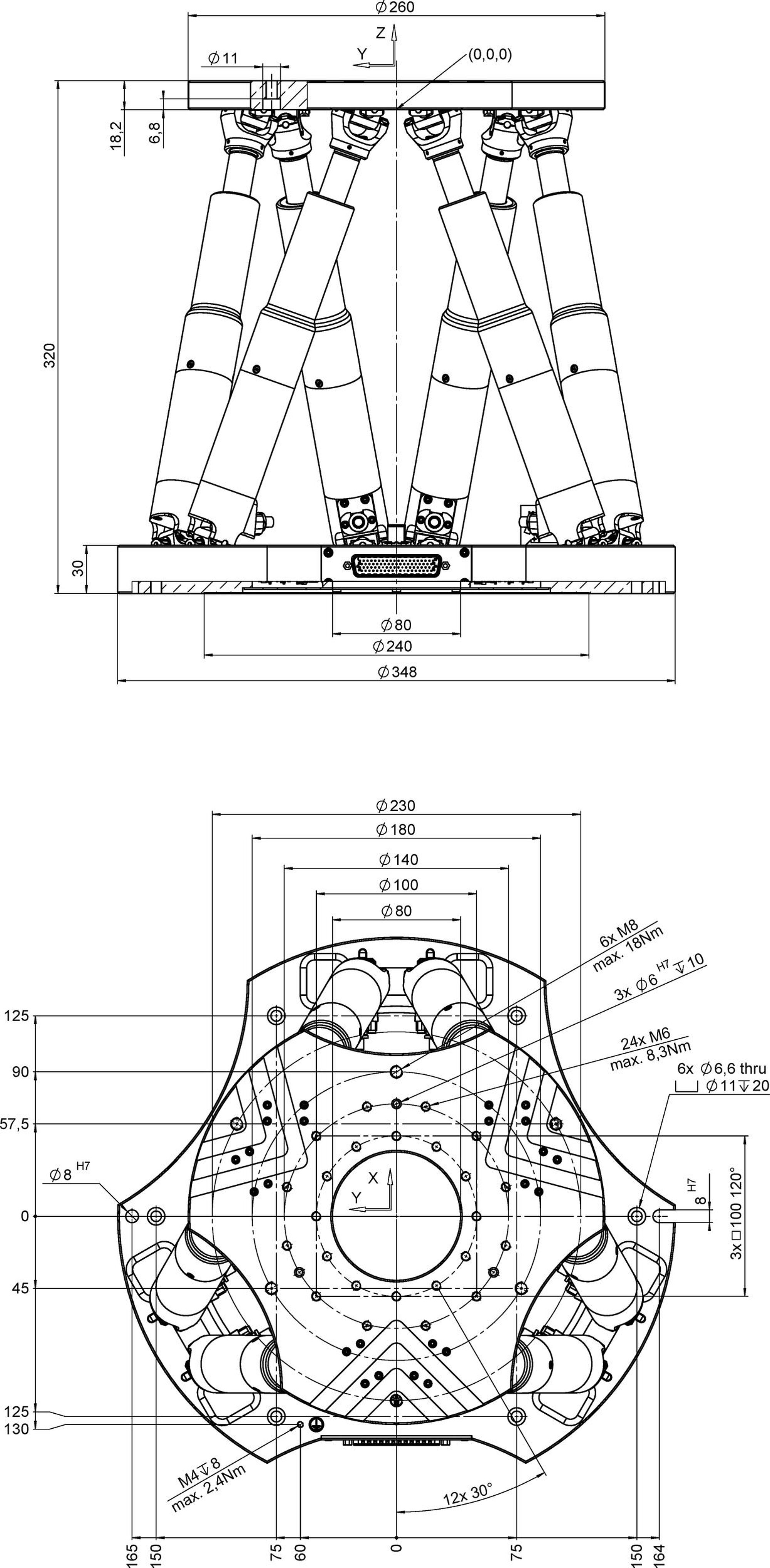
H-840.D2A
运动六足位移台;无刷直流电机;绝对编码器;有效载荷为10kg;最大速度为60mm/s。 连接电缆不包含在发货范围内,需单独订购。



















H-840六足位移台系列普遍适用于精密定位任务。 某些变型针对高动态进行了优化,例如可用于模拟运动,而带有减速齿轮支座的型号适用于较重的负载。
六自由度并联运动设计使其比可比的串联运动系统更加紧凑且更具刚性。 与串联设计(即堆叠系统)相比,它们的优势主要在于更高的路径精度和重复精度。 此外,其移动质量更低,可以提高动力学性能,并且对于所有运动轴均完全相同。 由于不移动电缆,不存在电缆管理问题。
使用无刷直流电机(BLDC)
无刷直流电机尤其适合高旋转速度。 能够精确对其进行控制并确保高精度。 由于无滑动接触,可无磨损地平稳运行,因此能够实现较长的使用寿命。
带绝对编码器的变型
绝对编码器提供明确的位置信息,帮助即刻确定位置。 因此,接通时无需参考,从而提高了运行期间的效率和安全性。
PI六足位移台仿真工具
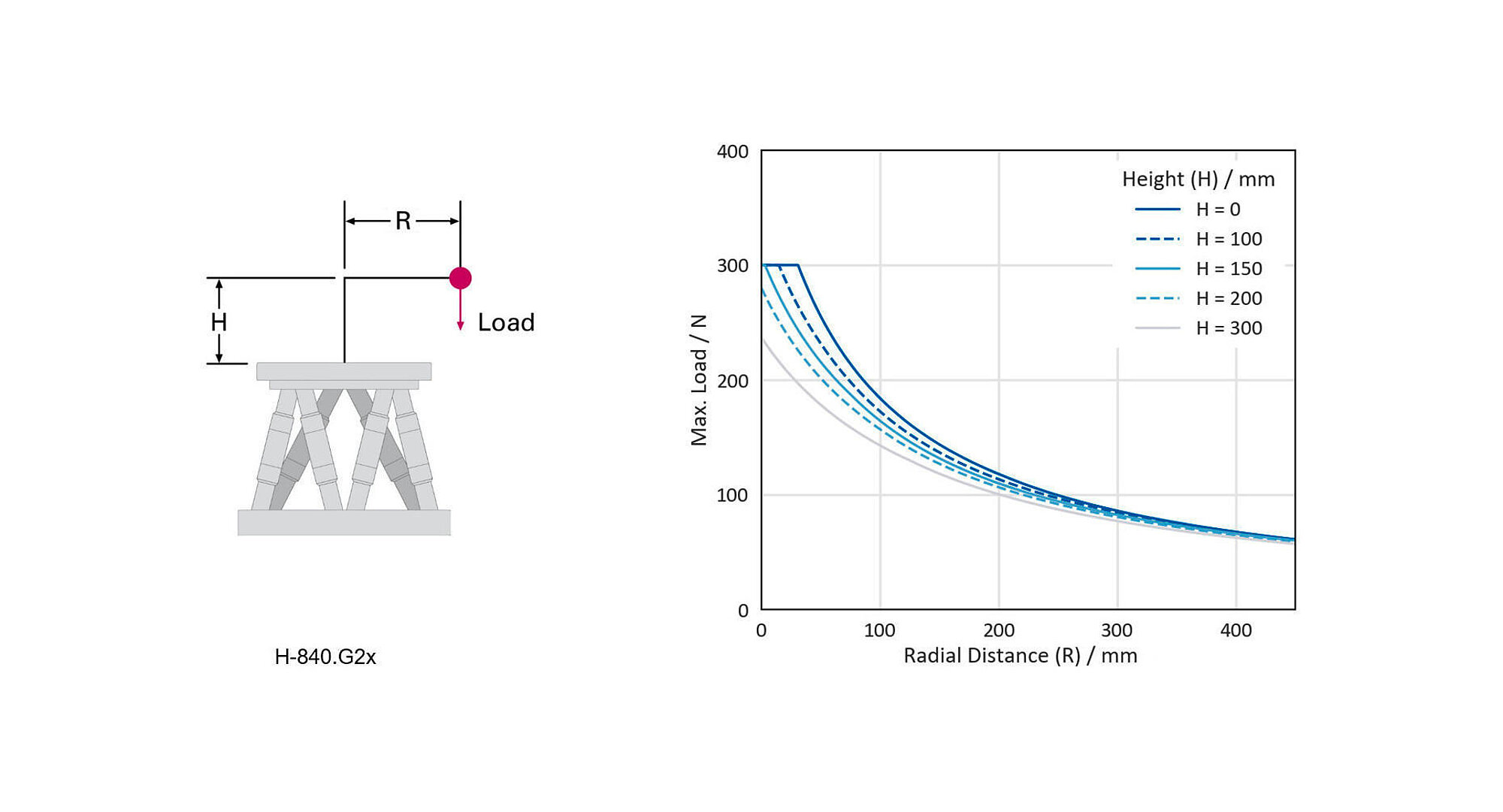
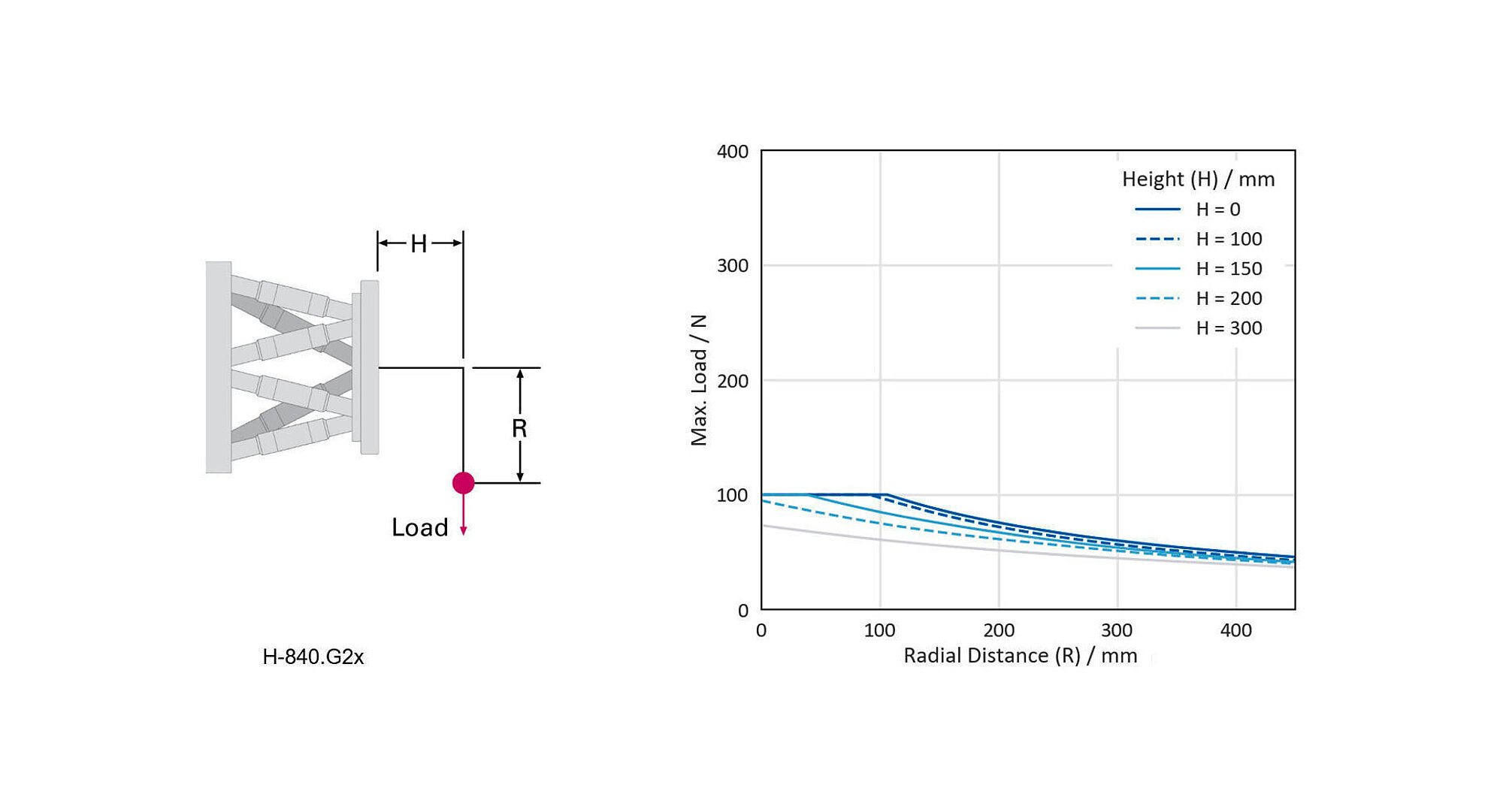
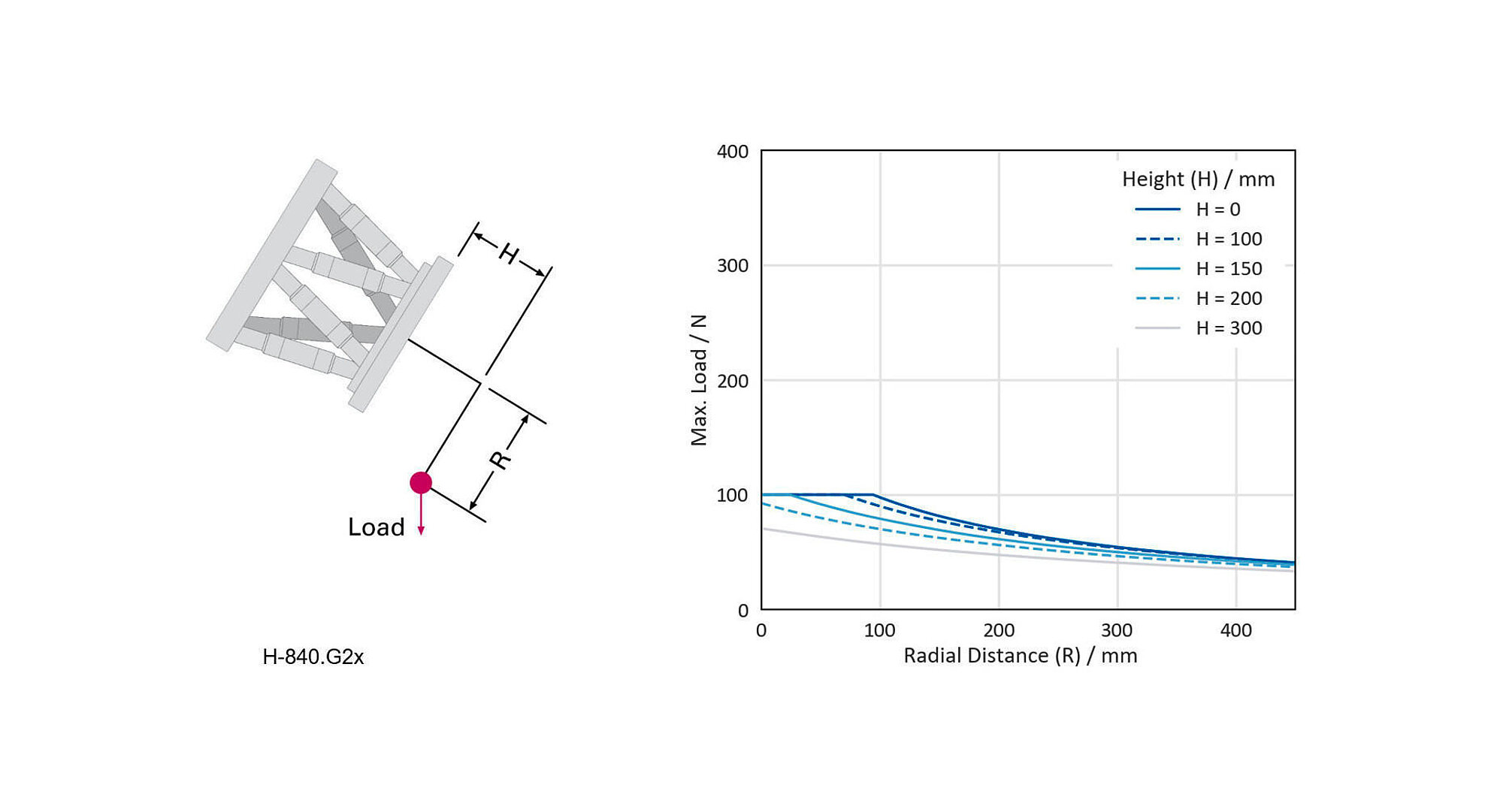
该仿真软件可模拟六足位移台的工作区和负载容量的限值。 因此,在购买之前,您即可核实特定的六足位移台型号是否可以应对应用中出现的负载、力和力矩。 为此,该仿真工具考虑了六足位移台的位置和运动以及枢轴点和多个参考坐标系。
应用领域
科研和工业。 用于运动仿真(通过CIPA认证)、工具检验、生命科学、微型制造、显微操纵、工业对准系统。
卓越机械设计
H-840机械结构采用带Z向偏移的万向节设计,兼具高刚性、低摩擦特性,同时配备高精度滚珠丝杠和高分辨率编码器。 凭借数十年创新经验,我们的设计团队持续优化机械结构,以实现性能提升。
6轴运动控制器/编程/软件
使用高度集成的PI C-887六轴六足位移台控制器,可快速简便地操控H-840六足位移台系统。 用户无需处理具体的六足位移台运动学计算,所有坐标变换均由控制器内部完成。 与传统层堆叠式多轴定位系统类似,所有位置均可通过直角坐标轻松设定。 借助强大的C-887六足位移台控制器及PI直观的软件包,用户可轻松编程任意枢轴点,而这一功能在光纤、光学元件、透镜或大型面板的对准应用中至关重要。 PI的C-887六足位移台运动控制器支持用户可编程坐标系,并提供EtherCat®、USB、以太网及模拟输入等接口选项。
无刷伺服电机(BLDC)适用于高占空比运行
6个六足位移台促动器均采用无刷伺服电机(BLDC)驱动。 与传统有刷伺服电机相比,无刷伺服电机不产生颗粒物,寿命更长,扭矩更高。
手动6轴控制
使用C-887.MC2手动控制单元,用户可对PI六足位移台的六个自由度进行手动控制,为应用设置带来便利并大大节约设置时间。 该手持控制器通过插接方式与六足位移台控制器连接,配备六个独立旋钮(X、Y、Z、俯仰角、偏转角、旋转角),操作逻辑与传统六轴平台类似。 当前位置信息显示在LCD显示屏上。
PIVirtualMove / 防碰撞软件
六足位移台仿真软件可模拟六足位移台的工作区和有效载荷的限值,帮助用户验证特定型号的六足位移台能否满足具体应用对负载、力及扭矩的需求。 该仿真软件工具综合考虑了六足位移台的位置和运动,以及枢轴点和多个参考坐标系。 C-887.VM1软件可帮助用户规避可能导致六足位移台或其搭载组件与周边物体碰撞的运动轨迹。
小型、大型和高速六足位移台
H-840六轴系统为中型六足位移台,适用于中型负载。 PI提供全系列标准六足位移台型号及多种配置选项,从手掌大小的H-811到数百公斤有效载荷的大型设备,满足各类精密定位需求。 PI六足位移台广泛应用于微透镜和光纤对准、复杂零件加工与自动化装配、汽车及航空航天等领域。 针对高精度、高速运动仿真需求,PI还提供特殊的音圈促动六足位移台。 当应用要求纳米/亚纳米级精度及毫秒级响应时,可选用PI压电式多轴纳米定位系统,例如PIMars六自由度平台系列。
六足位移台应用:六足位移台的应用场景
H-840六足位移台6轴定位系统适用于各种工业、自动化和研究应用,包括微型制造、显微操纵、光纤对准、光学和机械自动校准、卫星传感器测试、光学计量、刀具检验、X-射线衍射、光束样品定位和生命科学等领域。 H-840直驱高速型号已通过CIPA运动仿真认证,尤其适用于成像传感器与相机质量测试。
| 运动 | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | 公差 |
|---|---|---|---|---|---|
| 主动轴 | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| X向上的行程 | ± 50 mm | ± 50 mm | ± 50 mm | ± 50 mm | |
| Y向上的行程 | ± 50 mm | ± 50 mm | ± 50 mm | ± 50 mm | |
| Z向上的行程 | ± 25 mm | ± 25 mm | ± 25 mm | ± 25 mm | |
| θX向上的旋转范围 | ± 15 ° | ± 15 ° | ± 15 ° | ± 15 ° | |
| θY向上的旋转范围 | ± 15 ° | ± 15 ° | ± 15 ° | ± 15 ° | |
| θZ向上的旋转范围 | ± 30 ° | ± 30 ° | ± 30 ° | ± 30 ° | |
| X向上的最大速度 | 60 mm/s | 60 mm/s | 2.5 mm/s | 2.5 mm/s | |
| X向上的典型速度 | 40 mm/s | 40 mm/s | 2 mm/s | 2 mm/s | |
| Y向上的最大速度 | 60 mm/s | 60 mm/s | 2.5 mm/s | 2.5 mm/s | |
| Y向上的典型速度 | 40 mm/s | 40 mm/s | 2 mm/s | 2 mm/s | |
| Z向上的最大速度 | 60 mm/s | 60 mm/s | 2.5 mm/s | 2.5 mm/s | |
| Z向上的典型速度 | 40 mm/s | 40 mm/s | 2 mm/s | 2 mm/s | |
| θX向上的最大角速度 | 700 mrad/s | 700 mrad/s | 30 mrad/s | 30 mrad/s | |
| θX向上的典型角速度 | 480 mrad/s | 480 mrad/s | 25 mrad/s | 25 mrad/s | |
| θY向上的最大角速度 | 700 mrad/s | 700 mrad/s | 30 mrad/s | 30 mrad/s | |
| θY向上的典型角速度 | 480 mrad/s | 480 mrad/s | 25 mrad/s | 25 mrad/s | |
| θZ向上的最大角速度 | 700 mrad/s | 700 mrad/s | 30 mrad/s | 30 mrad/s | |
| θZ向上的典型角速度 | 480 mrad/s | 480 mrad/s | 25 mrad/s | 25 mrad/s | |
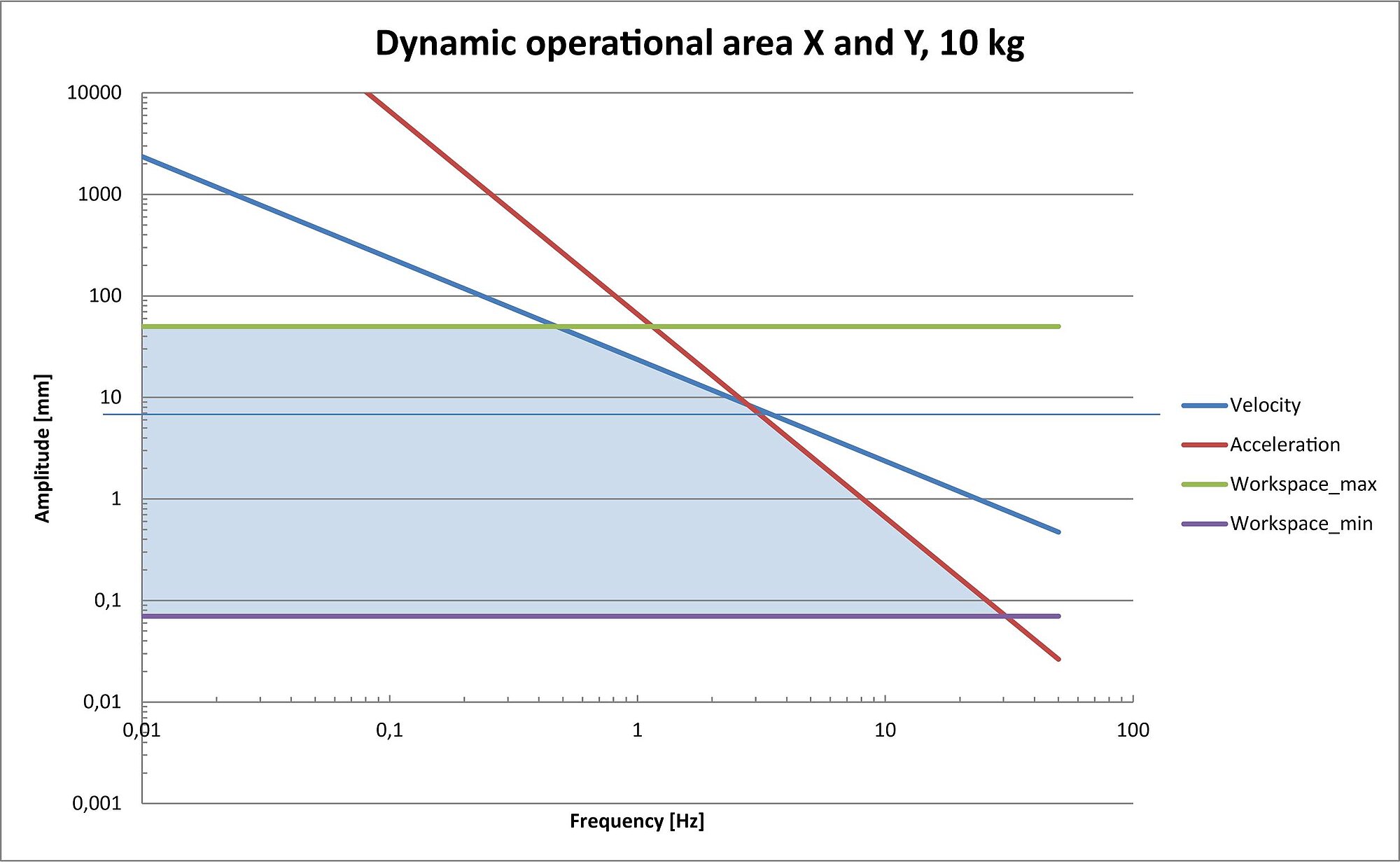
| X向上的振幅-频率乘积 | 23.6 mm·Hz | 23.6 mm·Hz | — | — | |
| Y向上的振幅-频率乘积 | 23.6 mm·Hz | 23.6 mm·Hz | — | — | |
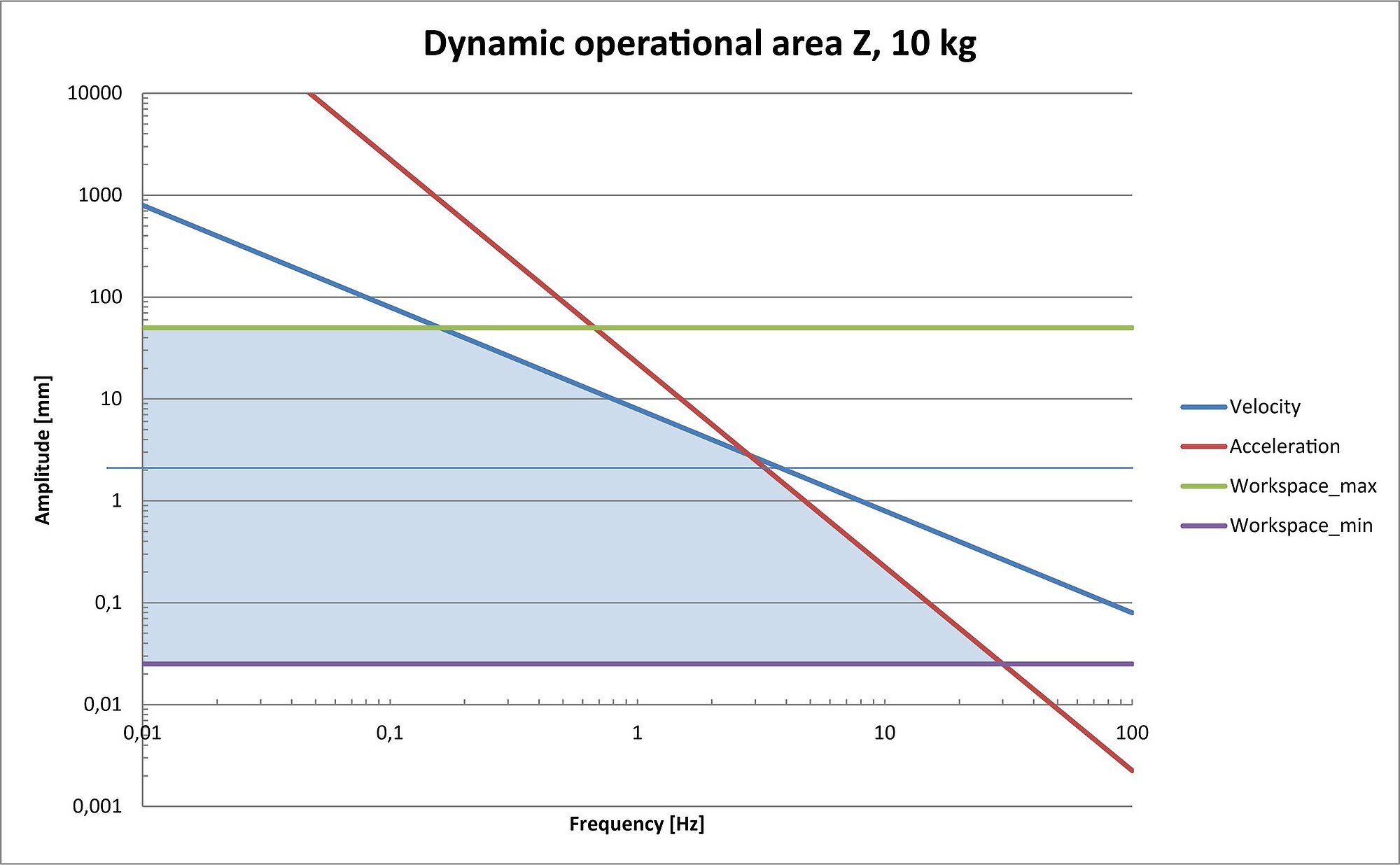
| Z向上的振幅-频率乘积 | 8 mm·Hz | 8 mm·Hz | — | — | |
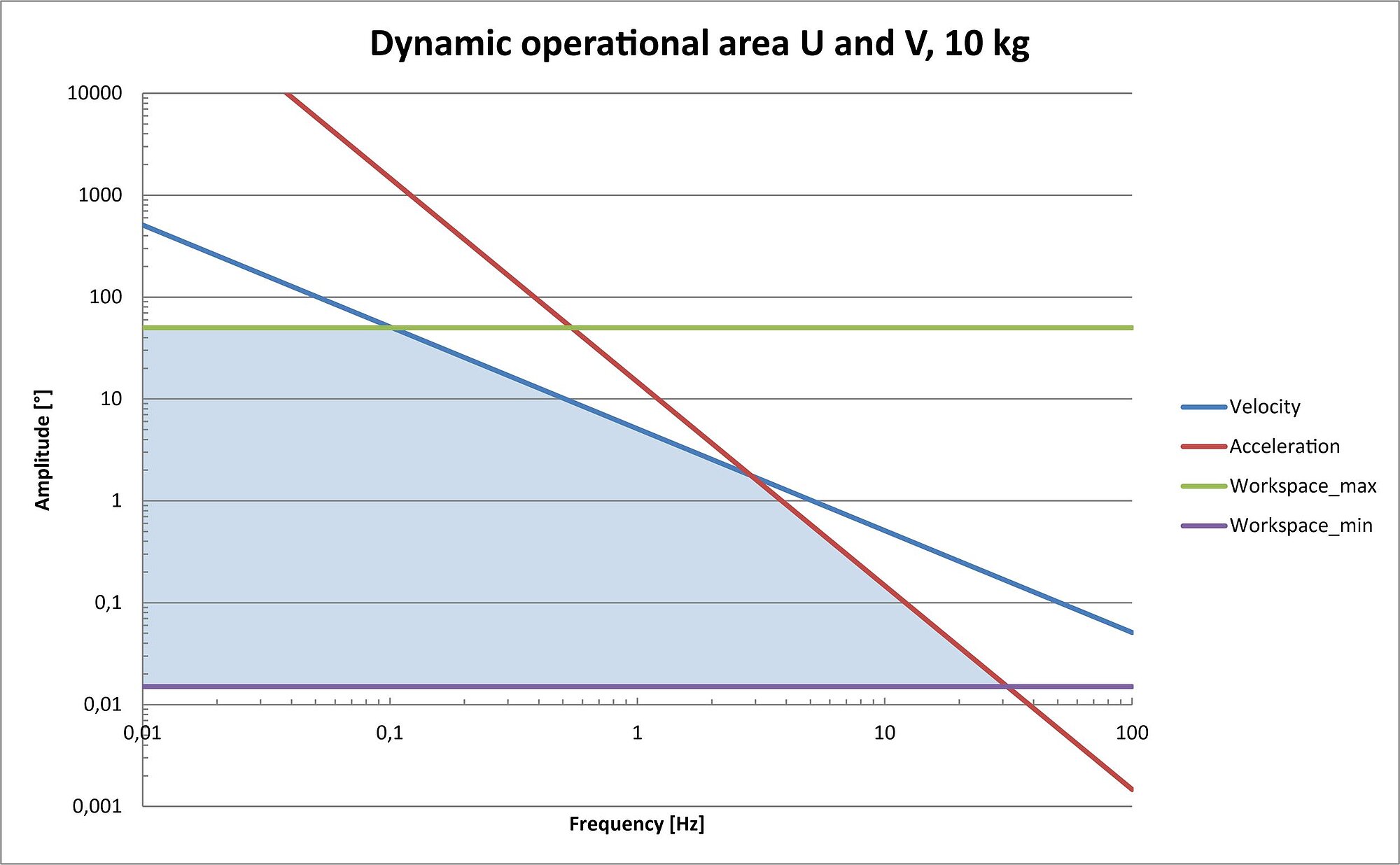
| θX向上的振幅-频率乘积 | 5.1 °·Hz | 5.1 °·Hz | — | — | |
| θY向上的振幅-频率乘积 | 5.1 °·Hz | 5.1 °·Hz | — | — | |
| θZ向上的振幅-频率乘积 | 14 °·Hz | 14 °·Hz | — | — | |
| X向上的振幅-频率²乘积 | 65.9 mm·Hz² | 65.9 mm·Hz² | — | — | |
| Y向上的振幅-频率²乘积 | 65.9 mm·Hz² | 65.9 mm·Hz² | — | — | |
| Z向上的振幅-频率²乘积 | 22.5 mm·Hz² | 22.5 mm·Hz² | — | — | |
| θX向上的振幅-频率²乘积 | 14.7 °·Hz² | 14.7 °·Hz² | — | — | |
| θY向上的振幅-频率²乘积 | 14.7 °·Hz² | 14.7 °·Hz² | — | — | |
| θZ向上的振幅-频率²乘积 | 41 °·Hz² | 41 °·Hz² | — | — | |
| 振幅误差 | 10 % | 10 % | — | — | max. |
| 相位误差 | 60 ° | 60 ° | — | — | max. |
| 最大频率 | 30 Hz | 30 Hz | — | — | |
| 定位 | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | 公差 |
| X向上的最小位移 | 1.5 µm | 0.5 µm | 0.3 µm | 0.25 µm | typ. |
| Y向上的最小位移 | 1.5 µm | 0.5 µm | 0.3 µm | 0.25 µm | typ. |
| Z向上的最小位移 | 1 µm | 0.25 µm | 0.2 µm | 0.15 µm | typ. |
| θX向上的最小位移 | 10 µrad | 3 µrad | 2 µrad | 2 µrad | typ. |
| θY向上的最小位移 | 10 µrad | 3 µrad | 2 µrad | 2 µrad | typ. |
| θZ向上的最小位移 | 2 µrad | 5 µrad | 4 µrad | 4 µrad | typ. |
| X向上的单向重复精度 | ± 0.3 µm | ± 0.3 µm | ± 0.3 µm | ± 0.3 µm | typ. |
| Y向上的单向重复精度 | ± 0.3 µm | ± 0.3 µm | ± 0.3 µm | ± 0.3 µm | typ. |
| Z向上的单向重复精度 | ± 0.1 µm | ± 0.1 µm | ± 0.1 µm | ± 0.1 µm | typ. |
| θX向上的单向重复精度 | ± 1.5 µrad | ± 1.5 µrad | ± 2.5 µrad | ± 2.5 µrad | typ. |
| θY向上的单向重复精度 | ± 1.5 µrad | ± 1.5 µrad | ± 2.5 µrad | ± 2.5 µrad | typ. |
| θZ向上的单向重复精度 | ± 3 µrad | ± 3 µrad | ± 3 µrad | ± 3 µrad | typ. |
| X向上的空回 | 1.5 µm | 1.5 µm | 2 µm | 2 µm | typ. |
| Y向上的空回 | 1.5 µm | 1.5 µm | 2 µm | 2 µm | typ. |
| Z向上的空回 | 0.2 µm | 0.25 µm | 0.3 µm | 0.3 µm | typ. |
| θX向上的空回 | 4 µrad | 4 µrad | 5 µrad | 5 µrad | typ. |
| θY向上的空回 | 4 µrad | 4 µrad | 5 µrad | 5 µrad | typ. |
| θZ向上的空回 | 8 µrad | 8 µrad | 10 µrad | 10 µrad | typ. |
| 集成传感器 | 绝对旋转编码器,多圈 | 增量旋转编码器 | 绝对旋转编码器,多圈 | 增量旋转编码器 | |
| 驱动性能 | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | 公差 |
| 驱动类型 | 无刷直流电机 | 无刷直流电机 | 无刷直流齿轮电机 | 无刷直流齿轮电机 | |
| 机械性能 | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | 公差 |
| 最大负载能力,底板沿水平方向 | 10 kg | 10 kg | 30 kg | 30 kg | |
| 最大负载能力,底板沿任意方向 | 3 kg | 3 kg | 10 kg | 10 kg | |
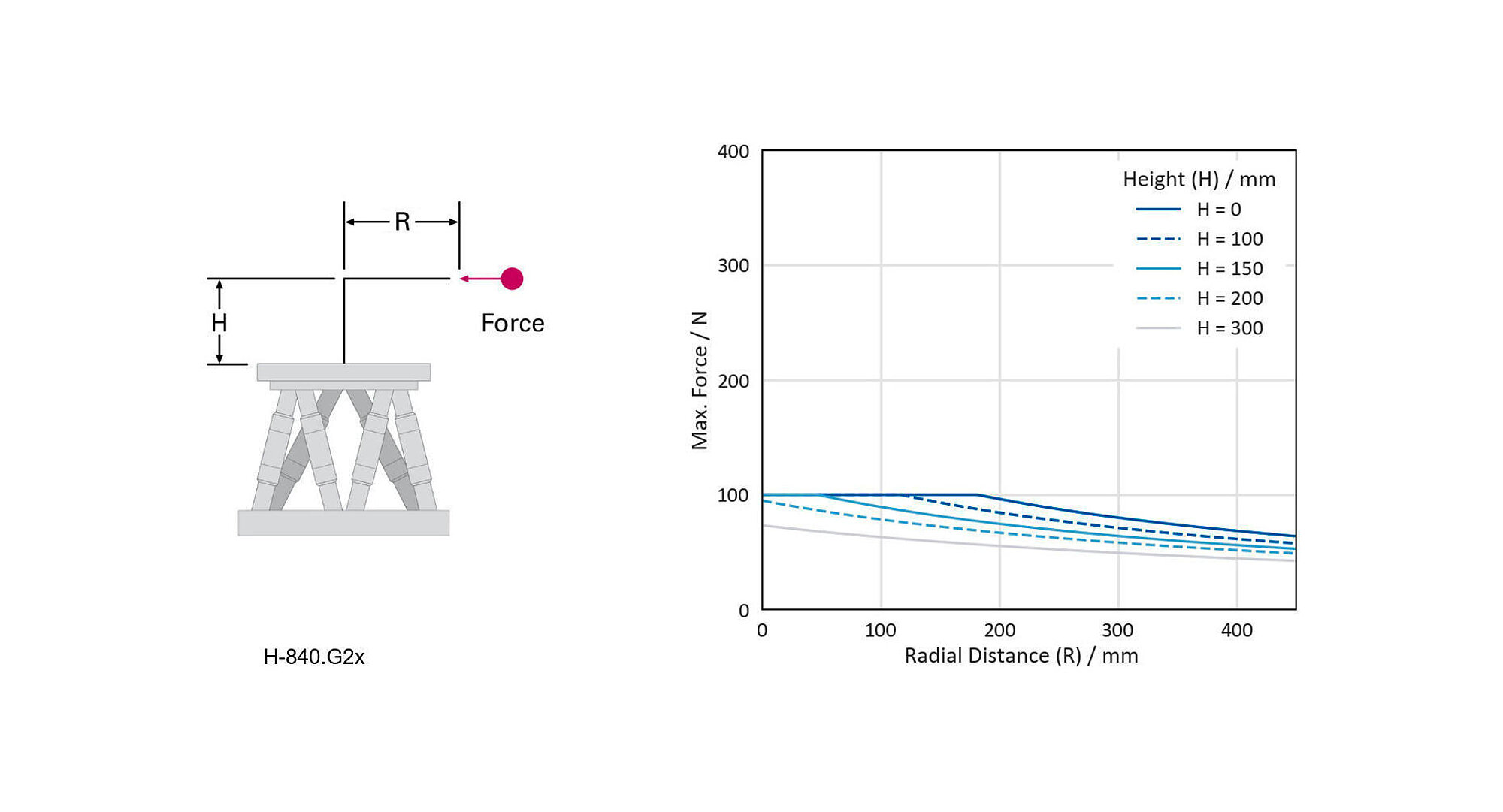
| 最大保持力,底板沿水平方向 | 15 N | 15 N | 100 N | 100 N | |
| 最大保持力,底板沿任意方向 | 5 N | 5 N | 25 N | 25 N | |
| 总质量 | 12 kg | 12 kg | 12 kg | 12 kg | |
| 材料 | 铝、钢 | 铝、钢 | 铝、钢 | 铝、钢 | |
| 其他 | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | 公差 |
| 工作温度范围 | -10至50 °C | -10至50 °C | -10至50 °C | -10至50 °C | |
| 数据传输连接器 | HD D-sub 78针(公头) | HD D-sub 78针(公头) | HD D-sub 78针(公头) | HD D-sub 78针(公头) | |
| 电源电压连接器 | M12 4极(公头) | M12 4极(公头) | M12 4极(公头) | M12 4极(公头) | |
| 推荐控制器/驱动器 | C-887.5xx | C-887.5xx | C-887.5xx | C-887.5xx |
连接电缆不包含在发货范围内,必须单独订购。
询问定制版本。
测量定位的规格时,使用典型速度。数据以测量报告的形式包含在产品交付中,并存储在PI中。
各个坐标(X、Y、Z、θX、θY、θZ)的最大行程范围是相互依存的。当所有其他轴都处于标称行程范围的零位置并且使用默认坐标系时,或者更确切地说,当旋转中心点设置为0,0,0时,每个轴的数据显示其最大行程范围。
PI技术数据是在22±3°C环境温度下定义的。除非有特别说明,所有数值均基于无负载的情况。某些性能参数是相互关联的。“typ.”标识 是指属性的统计平均值,并非承诺每个交付产品均达到该数值。在产品交付前的最后检验中,我们只检测选定的属性,而不是全部属性。请注意,产品的某些特性可能会随着使用时间的增长而逐渐下降。
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
运动六足位移台;无刷直流电机;绝对编码器;有效载荷为10kg;最大速度为60mm/s。 连接电缆不包含在发货范围内,需单独订购。
运动六足位移台;无刷直流电机;增量旋转编码器;有效载荷为10kg;最大速度为60mm/s。 连接电缆不包含在发货范围内,需单独订购。
精密六足位移台;无刷直流齿轮电机;绝对编码器;有效载荷为30kg;最大速度为2.5mm/s。 连接电缆不包含在发货范围内,需单独订购。
精密六足位移台;无刷直流齿轮电机;增量旋转编码器;有效载荷为30kg;最大速度为2.5mm/s。 连接电缆不包含在发货范围内,需单独订购。